

Noch aktueller auf http://www.brainelectronics.de
Idee
Die Idee für den diesjährigen Jugend forscht Wettbewerbs war die Entwicklung eines Roboters, welcher einen bestmöglich stabilen und natürlichen Ablauf eines Schrittes nachahmt und optimal mit einem oder mehreren Computern verknüpft werden kann, um am Ende auf diese Weise gesteuert zu werden. Der heutige Stand der Entwicklung von Laufrobotern beschränkt sich einzig auf das Laufen, hierbei entweder mit einem natürlichen Ablauf oder einem standfesten Algorithmus. Eine Integration von externen Steuercomputern, welche den Roboter fernsteuerbar machen, erfolgt jedoch nur geringfügig.
Ziel ist es zum Ende der Arbeit einen kostengünstigen, lauffähigen, per Computer steuerbaren Roboter zu erhalten, welcher ein Minimum an Elektronik und Mechanik beinhaltet jedoch ein Maximum an Funktionen, Mobilität und Erweiterungsmöglichkeiten erlaubt.
Vorgehensweise
Zu Beginn des Projekts wurde die Analyse eines Schrittes vorgenommen, wobei hierzu eine Videoaufzeichnung
herangezogen wurde, um einen Überblick über die Bewegungsabfolge des menschlichen Schrittes zu erhalten. Anschließend entstand ein einfacher Roboter, welcher mit allen erforderlichen Gelenken eines Fußes ausgestattet wurde. VICTOR entwickelte sich im Zuge dieser Arbeit stetig weiter und wurde hinsichtlich der Standsicherheit, dem Funktionsumfang sowie Hardware optimiert. Zum Ende dieses Projekts wurde der beobachtete und tabellarisch festgehaltene Bewegungsablauf in einen allgemeinen Algorithmus gefasst, um weitere Bewegungsabläufe anderer Personen erweitert, gemittelt und an den bis dahin entwickelten Roboter angepasst.
Ergebnis
Bis Ende Januar 2013 konnte die Analyse mehrerer Bewegungsabläufe, die Entwicklung des Algorithmus, ein stabiler und auf die erfassten Parameter abgestimmter Roboter, sowie ein Steuerungsprogramm für den Computer erfolgreich umgesetzt werden.
 VICTOR V1.0
VICTOR V1.0
VICTOR V2

VICTOR V3 verfügt bereits über 4 Freiheitsgrade pro Bein
VICTOR V3

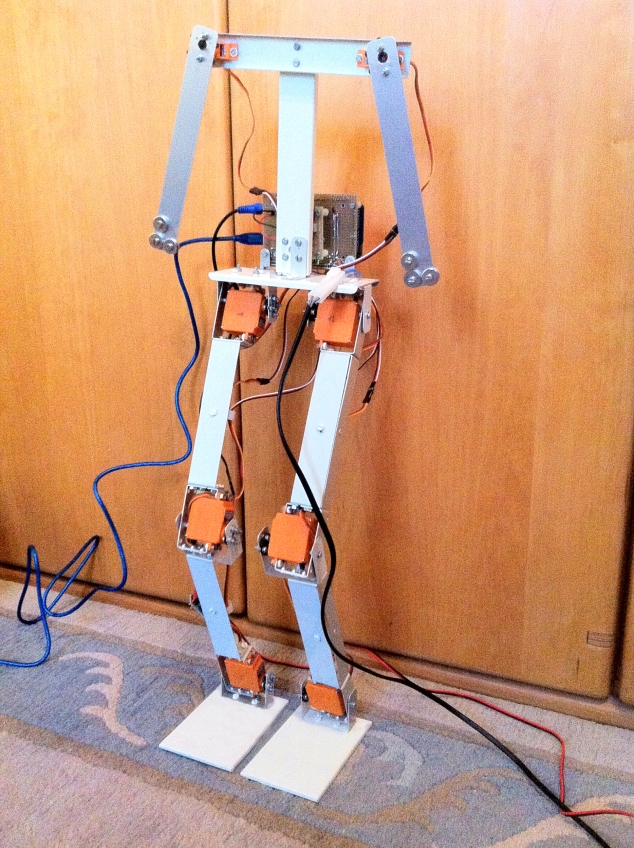
VICTOR V4 wurde um 2 Freiheitsgrade auf insgesamt 10 DOF in den Beinen erweitert
VICTOR V4

VICTOR V4 steht normal, hier ist der Fertigungsfehler in der Länge der Beine am deutlichsten sichtbar
VICTOR V4
 VICTOR V4: Schritt 2
VICTOR V4: Schritt 2
 VICTOR V4: Schritt 3
VICTOR V4: Schritt 3

VICTOR V4 im Spagat
 Controller Programm
Controller Programm
